 |
ERGOBOSS: Ergonomic Optimization of Body-Supporting Surfaces
Danyong Zhao, Yijing Li, Timothy Langlois, Siddhartha Chaudhuri, Jernej Barbič
IEEE Transactions on Visualization and Computer Graphics, accepted for final publication, 2021.
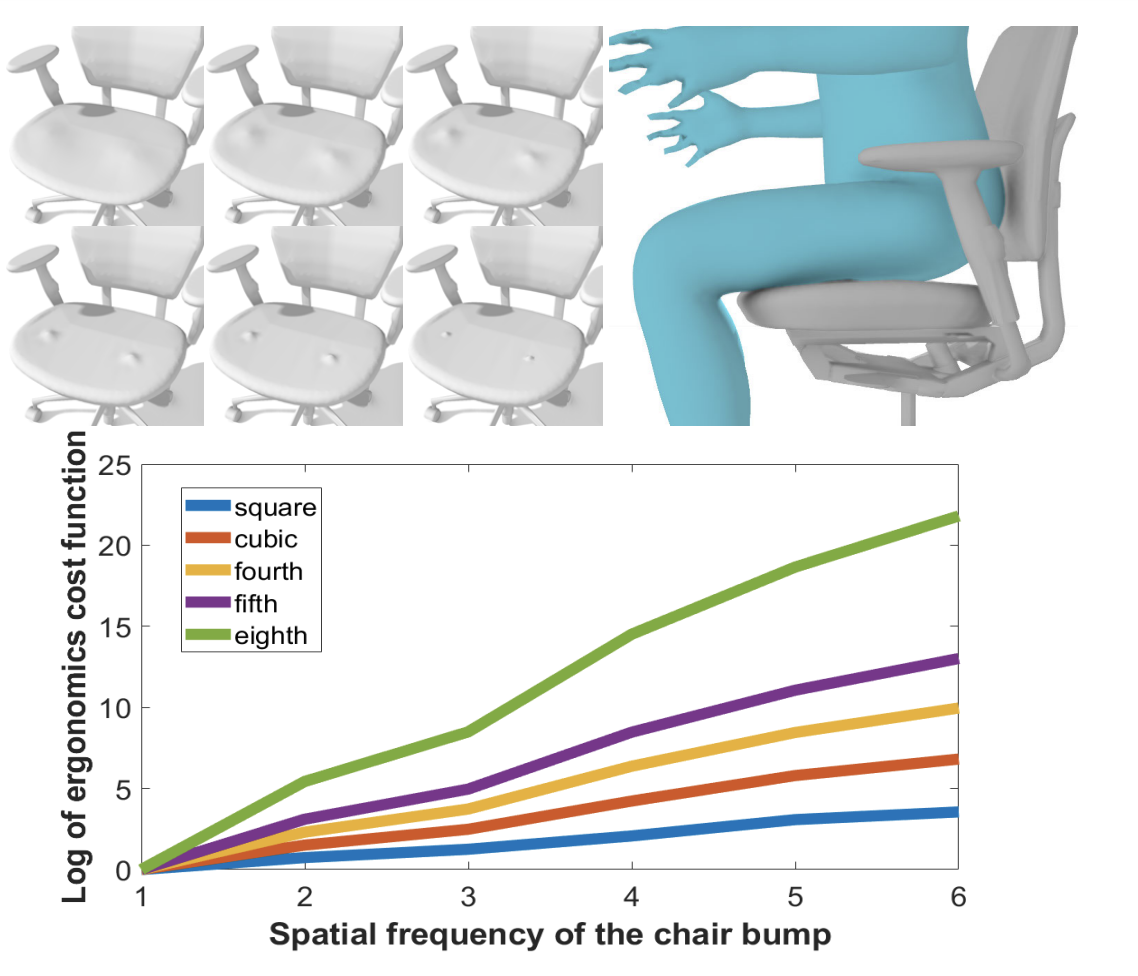
Humans routinely sit or lean against supporting surfaces and it is important to shape these surfaces to be comfortable and
ergonomic. We give a method to design the geometric shape of rigid supporting surfaces to maximize the ergonomics of physically
based contact between the surface and a deformable human. We model the soft deformable human using a layer of FEM deformable
tissue surrounding a rigid core, with measured realistic elastic material properties, and large-deformation nonlinear analysis. We define
a novel cost function to measure the ergonomics of contact between the human and the supporting surface. We give a stable and
computationally efficient contact model that is differentiable with respect to the supporting surface shape. This makes it possible to
optimize our ergonomic cost function using gradient-based optimizers. Our optimizer produces supporting surfaces superior to prior
work on ergonomic shape design. Our examples include furniture, apparel and tools. We also validate our results by scanning a real
human subject’s foot and optimizing a shoe sole shape to maximize foot contact ergonomics. We 3D-print the optimized shoe sole,
measure contact pressure using pressure sensors, and demonstrate that the real unoptimized and optimized pressure distributions
qualitatively match those predicted by our simulation.
[project page] [paper 7.4 Mb] [video 27.5 Mb] [bibtex] |
 |
Evaluating the Efficiency of Six-DoF Haptic Rendering-Based Virtual Assembly Training
Mianlun Zheng, Danyong Zhao,Jernej Barbič
IEEE Transactions on Haptics, 14(1), 2021.
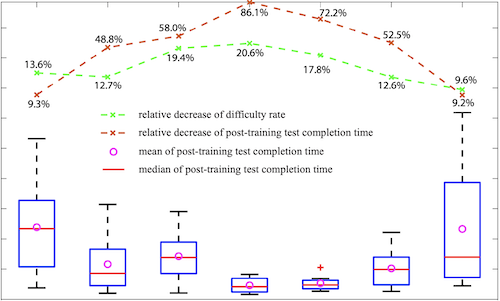
Haptics plays an important role in training users to assemble mechanical components such as airplane or car parts. Because mechanical components are often geometrically complex, efficient collision detection and 6-DoF haptic rendering of contact are required for virtual assembly, and this has been extensively explored in prior work. However, as our work shows, this alone is not sufficient for efficient virtual assembly training. Our work asks how to augment 6-DoF haptic rendering of contact to maximize virtual assembly training efficiency, and proposes and measures several visual and haptic guidance strategies. Our visual strategies consist of displaying animations of the correct assembly path, motion indicator cues, and close-ups on difficult assembly path sections. Our haptic guidance consists of forces and torques that correct the trainee's deviation from the path. We investigate several haptic guidance strategies, including continuous forces and torques, force/torque nudging and anti-forces/torques. We designed a user study to evaluate the training efficiency of our proposed strategies quantitatively, using ANOVA and Tukey statistics. Our main finding is that the most efficient training approach is to use haptic rendering of contact in combination with visual animation-based guidance. Continuous forces, nudging, anti-forces and motion indicator cues were measured to be less effective.
[project page] [paper 13.3 Mb] [video 39.1 Mb] [bibtex] |
 |
6-DoF Haptic Rendering of Static Coulomb Friction Using Linear Programming
Danyong Zhao,Yijing Li, Jernej Barbič
IEEE Transactions on Haptics 2018, 11(3), 2018.
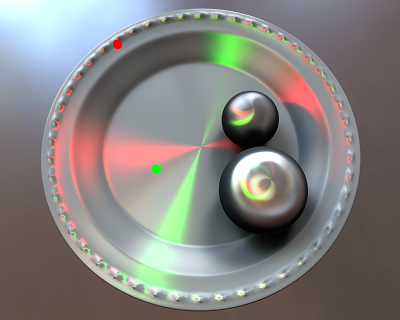
Simulating frictional contact between objects with complex geometry is important for 6-DoF haptic rendering applications. For example, friction determines whether components can be navigated past narrow clearances in virtual assembly. State-of-the-art haptic rendering of frictional contact either augments penalty contact with frictional penalty springs, which do not prevent sliding and cannot render correct static friction, or uses constraint-based methods that have difficulties in meeting the stringent haptic loop computation time requirements for complex geometry. We give a 6-DoF Coulomb friction haptic rendering algorithm for distributed contact between rigid objects with complex geometry. Our algorithm is compatible with the fast point vs implicit function penalty-based contact method such as the Voxmap-PointShell method. Our algorithm incorporates the maximal dissipation principle and produces correct static friction, all the while inheriting the speed of penalty-based methods. We demonstrate our algorithm on several challenging 6-DoF haptic rendering examples.
[project page] [paper 9 Mb] [video 141 Mb] [bibtex] |
 |
Asynchronous Implicit Backward Euler Integration
Danyong Zhao,Yijing Li, Jernej Barbič
Symposium on Computer Animation (SCA) 2016, Zurich, Switzerland.
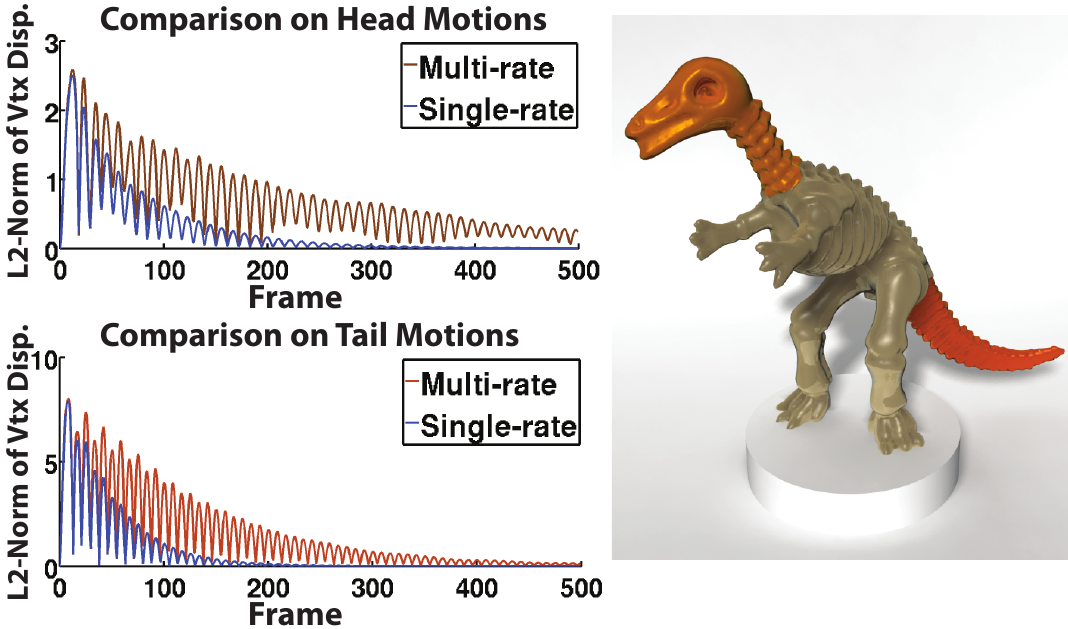
In standard deformable object simulation in computer animation, all the mesh elements or vertices are timestepped synchronously, i.e., under the same timestep. Previous asynchronous methods have been largely limited to explicit integration. We demonstrate how to perform spatially-varying timesteps for the widely popular implicit backward Euler integrator. Spatially-varying timesteps are useful when the object exhibits spatially-varying material properties such as Young's modulus or mass density. In synchronous simulation, a region with a high stiffness (or low mass density) will force a small timestep for the entire mesh, at a great computational cost, or else, the motion in the stiff (or low mass density) region will be artificially damped and inaccurate. Our method can assign smaller timesteps to stiffer (or lighter) regions, which makes it possible to properly resolve (sample) the high-frequency deformable dynamics arising from the stiff (or light) materials, resulting in greater accuracy and less artificial damping. Because soft (or heavy) regions can continue using a large timestep, our method provides a significantly higher accuracy under a fixed computational budget.
[project page] [paper 4.1M] [video 23M] [slides 25M] [bibtex] |
 |
Anisotropic Spherical Gaussians
Kun Xu, Wei-Lun Sun, Zhao Dong, Dan-Yong Zhao, Run-Dong Wu, Shi-Min Hu
ACM Transactions on Graphics 32(6), 209:1 - 209:11, 2013. (Proceedings of SIGGRAPH Asia 2013).
We present a novel Anisotropic Spherical Gaussian (ASG) function, built upon the Bingham distribution [Bingham 1974], which is much more effective and efficient in representing anisotropic spherical functions than Spherical Gaussians (SGs). In addition to retaining many desired properties of SGs, ASGs are also rotationally invariant and capable of representing all-frequency signals. To further strengthen the properties of ASGs, we have derived approximate closed-form solutions for their integral, product and convolution operators, whose errors are nearly negligible, as validated by quantitative analysis. Supported by all these operators, ASGs can be adapted in existing SG-based applications to enhance their scalability in handling anisotropic effects. To demonstrate the accuracy and efficiency of ASGs in practice, we have applied ASGs in two important SG-based rendering applications and the experimental results clearly reveal the merits of ASGs.
[project page] [paper 2.3M] [supplemental 1.7M] [slides 16.5M][video 45.8M] [bibtex] |
