 Modeling of Personalized Anatomy using Plastic Strains
Modeling of Personalized Anatomy using Plastic Strains
ACM Transaction on Graphics (TOG) 2021
People
Project material
Citation
|
|
Abstract
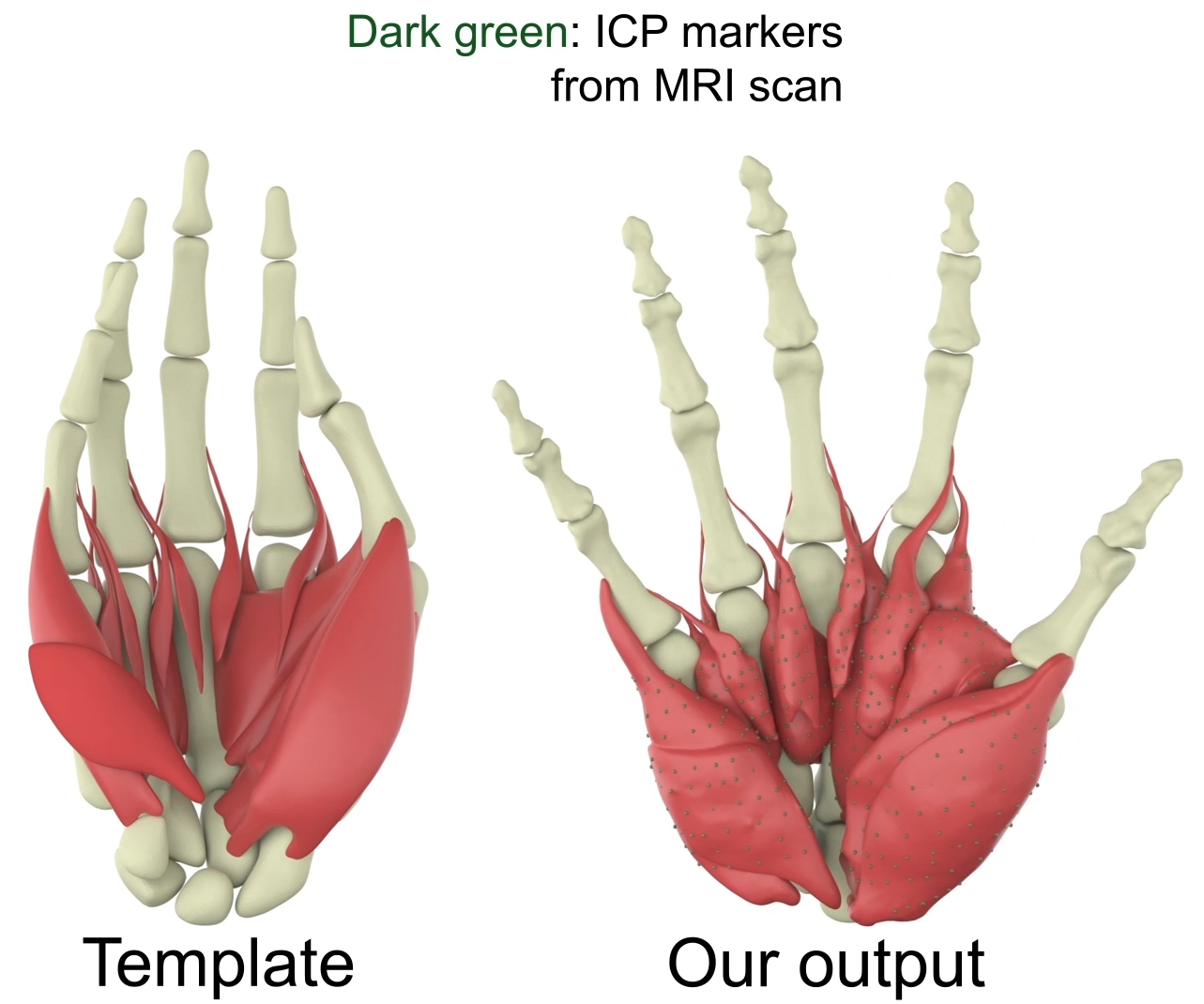
We give a method for modeling solid objects undergoing large spatially varying and/or anisotropic strains, and use it to reconstruct human anatomy from medical images. Our novel shape deformation method uses plastic strains and the Finite Element Method to successfully model shapes undergoing large and/or anisotropic strains, specified by sparse point constraints on the boundary of the object. We extensively compare our method to standard second-order shape deformation methods, variational methods and surface-based methods and demonstrate that our method avoids the spikiness, wiggliness and other artefacts of previous methods. We demonstrate how to perform such shape deformation both for attached and un-attached ("free flying") objects, using a novel method to solve linear systems with singular matrices with a known nullspace. While our method is applicable to general large-strain shape deformation modeling, we use it to create personalized 3D triangle and volumetric meshes of human organs, based on MRI or CT scans. Given a medically accurate anatomy template of a generic individual, we optimize the geometry of the organ to match the MRI or CT scan of a specific individual. Our examples include human hand muscles, a liver, a hip bone, and a gluteus medius muscle ("hip abductor").
Comments, questions to Jernej Barbič.
Related projects
- Simulation of Hand Anatomy Using Medical Imaging
- Hand Modeling and Simulation Using Stabilized Magnetic Resonance Imaging
Acknowledgments
- NSF (IIS-1911224)
- USC Annerberg Graduate Fellowships to Bohan Wang
- Bosch Research
- Adobe Research
Conflict of interest statement
The hip bone and hip muscle template meshes were obtained at Ziva Dynamics. Jernej Barbic is a shareholder, CTO and board member of Ziva Dynamics. Ziva Dynamics was not involved in this research. Nothing in this paper is to be understood as endorsement of Ziva Dynamics or its products.Disclaimer
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Copyright notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
Unique accesses: