 6-DoF Haptic Rendering using Continuous Collision Detection Between Points and Signed Distance Fields
6-DoF Haptic Rendering using Continuous Collision Detection Between Points and Signed Distance Fields
IEEE Transactions on Haptics 2017
People
- Hongyi Xu
University of Southern California - Jernej Barbič
University of Southern California
Project material
Citation
-
Hongyi Xu, Jernej Barbič:
6-DoF Haptic Rendering using Continuous Collision Detection Between Points and Signed Distance Fields, IEEE Transactions on Haptics, 10(2), 2017, p. 151-161 BIBTEX
Abstract
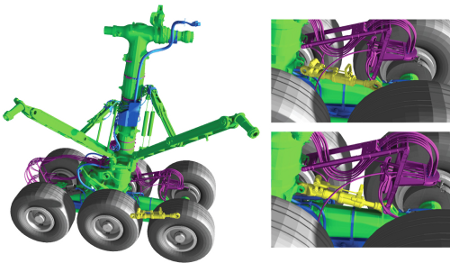
We present an algorithm for fast continuous collision detection between points and signed distance fields, and demonstrate how to robustly use it for 6-DoF haptic rendering of contact between objects with complex geometry. Continuous collision detection is often needed in computer animation, haptics and virtual reality applications, but has so far only been investigated for polygon (triangular) geometry representations. We demonstrate how to robustly and continuously detect intersections between points and level sets of the signed distance field. We suggest using an octree subdivision of the distance field for fast traversal of distance field cells. We also give a method to resolve continuous collisions between point clouds organized into a tree hierarchy and a signed distance field, enabling rendering of contact between rigid objects with complex geometry. We investigate and compare two 6-DoF haptic rendering methods now applicable to point-vs-distance field contact for the first time: continuous integration of penalty forces, and a constraint-based method. An experimental comparison to discrete collision detection demonstrates that the continuous method is more robust and can correctly resolve collisions even under high velocities and during complex contact.
Comments, questions to Jernej Barbič.Related projects
- Continuous Collision Detection Between Points and Signed Distance Fields
- Adaptive 6-DoF Haptic Contact Stiffness Using the Gauss Map
- Six-DoF Haptic Rendering of Contact between Geometrically Complex Reduced Deformable Models
- Implict Multibody Penalty-based Distributed Contact
- Signed Distance Fields for Polygon Soup Meshes
Funding
- NSF (CAREER-1055035, IIS-1422869)
- Sloan Foundation
- Okawa Foundation
- USC Annerberg Graduate Fellowship to Hongyi Xu
Acknowledgment
- Boeing for providing the Boeing 777 dataset
Disclaimer
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Copyright notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
Unique accesses: