Real-time Control of Physically Based Simulations using Gentle Forces
People
- Jernej Barbič
CSAIL, Massachusetts Institute of Technology - Jovan Popović
CSAIL, Massachusetts Institute of Technology
Abstract
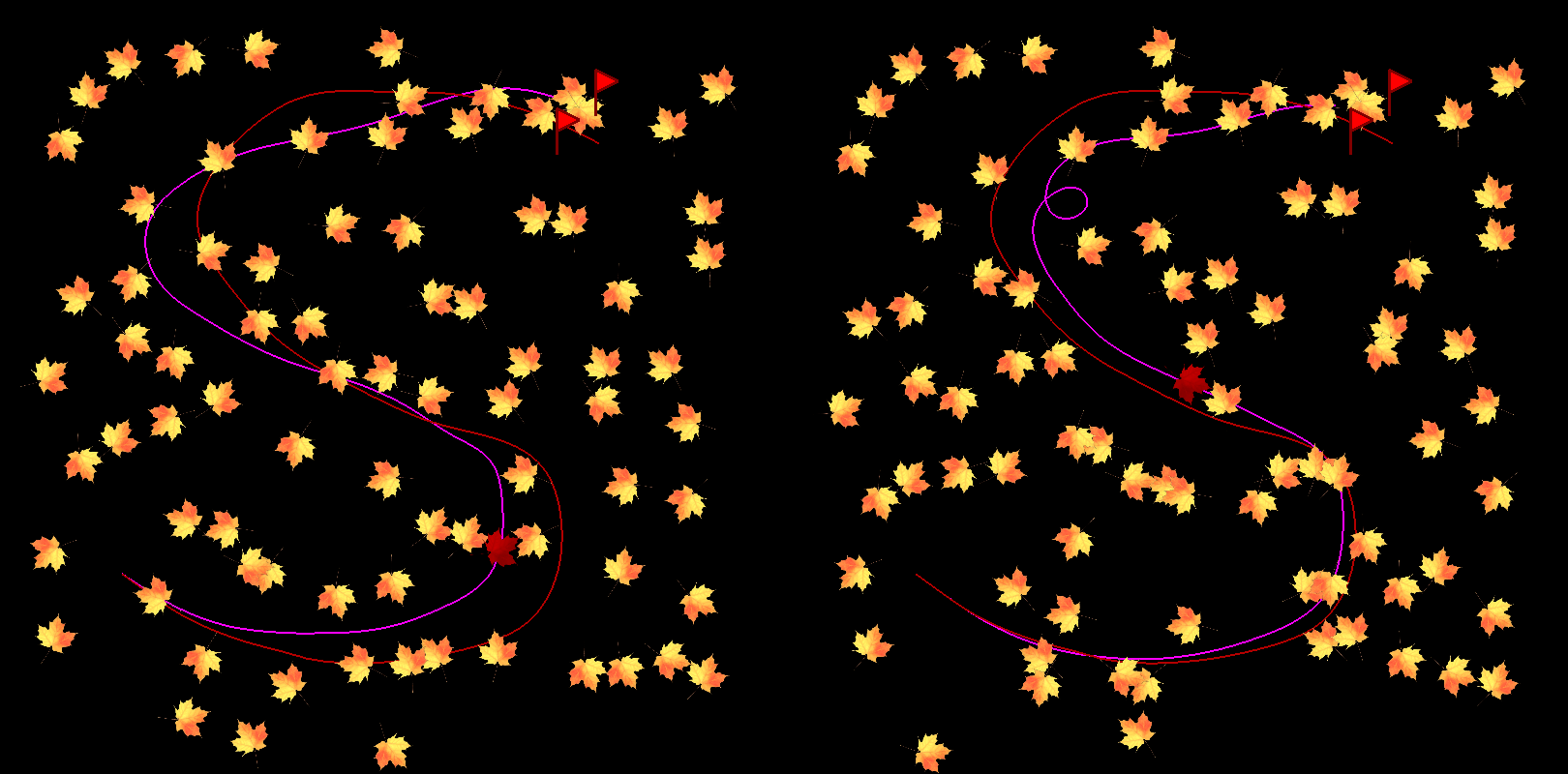
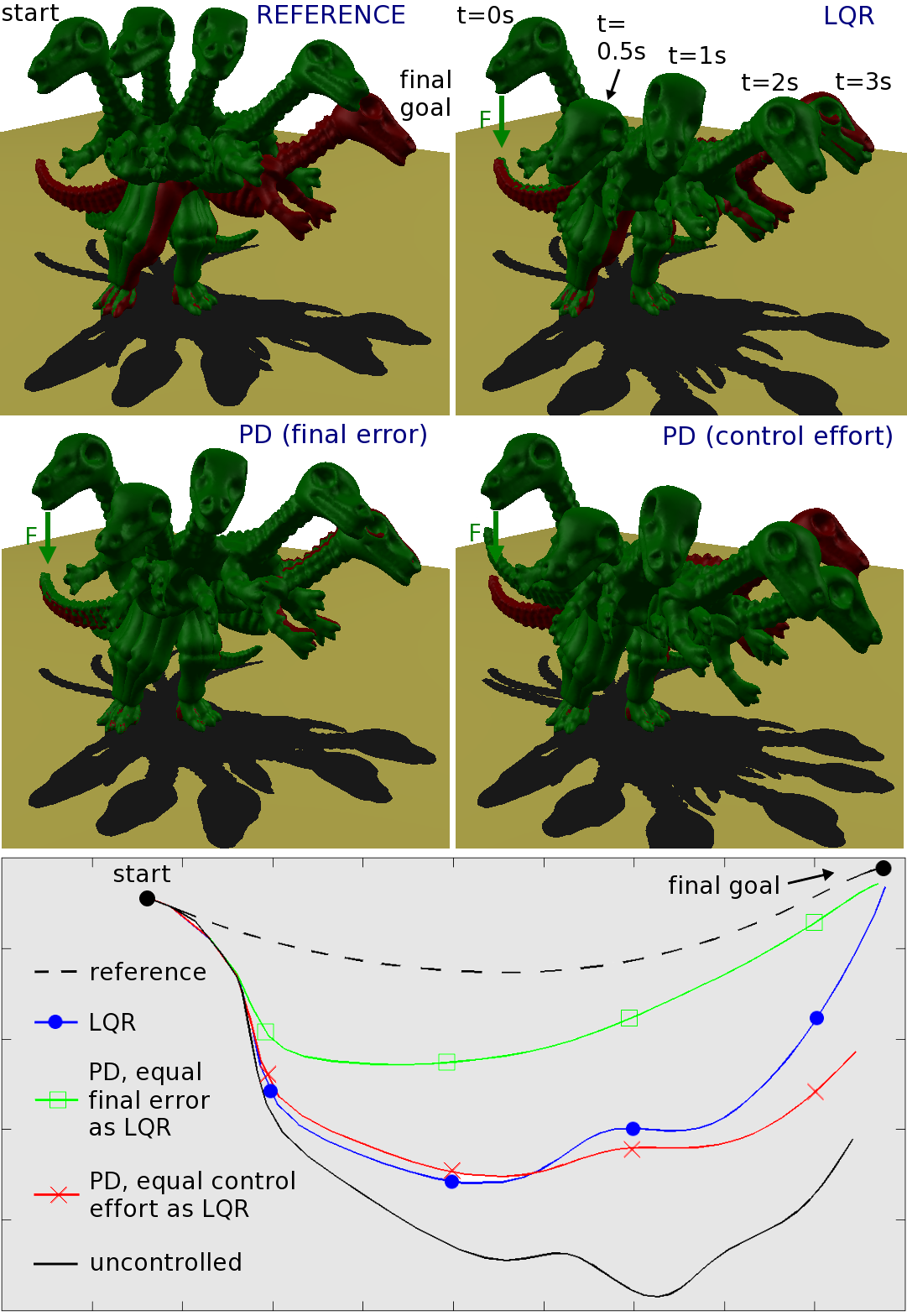
Recent advances have brought real-time physically based simulation within reach, but simulations are still difficult to control in real time. We present interactive simulations of passive systems such as deformable solids or fluids that are not only fast, but also directable: they follow given input trajectories while simultaneously reacting to user input and other unexpected disturbances. We achieve such directability using a real-time controller that runs in tandem with a real-time physically based simulation. To avoid stiff and overcontrolled systems where the natural dynamics are overpowered, the injection of control forces has to be minimized. This search for gentle forces can be made tractable in real-time by linearizing the system dynamics around the input trajectory, and then using a time-varying linear quadratic regulator to build the controller. We show examples of controlled complex deformable solids and fluids, demonstrating that our approach generates a requested fixed outcome for reasonable user inputs, while simultaneously providing runtime motion variety.
Citations
-
Jernej Barbič, Jovan Popović:
Real-time Control of Physically Based Simulations using Gentle Forces, ACM Transactions on Graphics 27(5) (SIGGRAPH Asia 2008), Singapore, Dec 2008. BIBTEX
Project material
- Paper (PDF, 3Mb)
- Video (Quicktime MP4, 42Mb)
- Conference presentation slides (Powerpoint PPT, 35Mb)
Related projects
- Deformable Object Animation Using Reduced Optimal Control
- Real-Time Subspace Integration for St.Venant-Kirchhoff Deformable Models
Funding
This research is supported by:
- The Singapore-MIT Gambit Lab
- Donation of Maya licences by Autodesk
Copyright notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
Unique accesses: